Hi @CryoEM2, we have seen this occasionally happen. On some datasets, the cross-validation strategy that we use to assess different hyperparameters seems convinced that the zero-trajectory regime is optimal. Does your final trajectory activity plot look like this example? The point I’m trying to draw attention to is the fact that the best (lowest) CV score appears to be at ~zero trajectory activity.
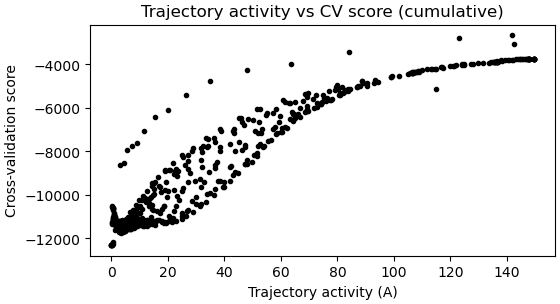
In this situation, I’d recommend manually putting in override hyperparameters. You can figure out what parameters to use as follows. Walk backwards through the hyperparameter optimization iterations and try to find the iteration where the best non-zero trajectory point occurs (using the trajectory activity vs CV score plot again). Then use the “CV score along each ray” plot to identify the best hyperparameters to use. Pick the darkest/bluest dot and match up the z and theta values to the table that is printed at the start of the iteration (example below)… on the left side of the table, there’s the r/theta/z parameters and on the right side you can read off the corresponding hyperparameter values
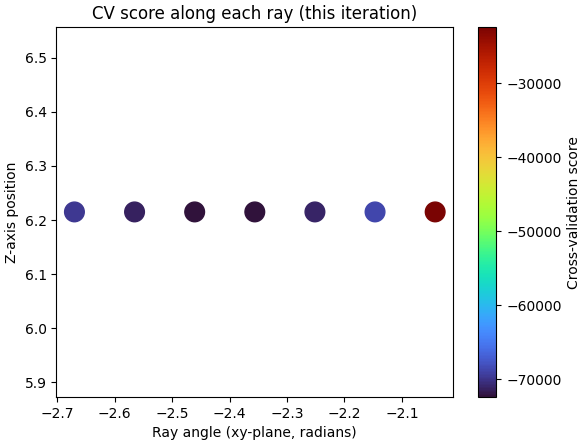
Iteration overview (parameters to be tried):
---r--- -theta- ---z--- | -spatial- -dist.- --accel--
7.360 -2.042 6.215 | 3.54e-02 500 1.42e-03
7.360 -2.147 6.215 | 1.82e-02 500 2.09e-03
7.360 -2.251 6.215 | 9.74e-03 500 3.28e-03
7.360 -2.356 6.215 | 5.49e-03 500 5.49e-03
7.360 -2.461 6.215 | 3.28e-03 500 9.74e-03
7.360 -2.566 6.215 | 2.09e-03 500 1.82e-02
7.360 -2.670 6.215 | 1.42e-03 500 3.54e-02