What is the initial search range for shifts?
Is it using BnB for searches?
And are initial classes generated from random density, or reconstructions from some subset of initial particles?
For small/crowded particles, we often see highly populated classes with other particles intruding:
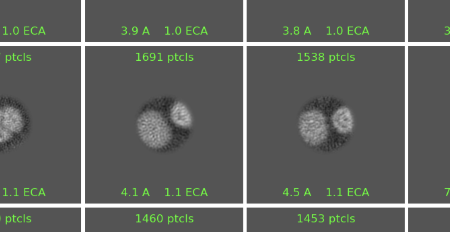
Even when the initial particle set appears visually very well-centered (e.g. after blob picking on denoised mics).
I suspect this is due to the initial shift search being too coarse, and leading to miscentered class averages which then persist. Reducing the mask diameter helps, up to a point, but reducing it too far degrades class averages (even when it is larger than the target particle).
Would it be possible to add options to control the shift (and possibly pose) search range & fine-ness for 2d classification?
As discussed here, options for segment/blob based recentering & local pose/shift search would also be very handy!
2D classification gets short shrift these days, but in difficult cases careful 2D can be essential to identify a population of particles that will converge during ab initio model generation…
Cheers
Oli